 English
English Português
PortuguêsFEEL I – VITRUVIUS FABLAB @ FISTA 2019
In 1970, Nicolas Negroponte and the Architecture Machine Group presented SEEK for the first time at the Software exhibition, curated by Jack Burnham for the Jewish Museum in New York. The piece consisted of a plexiglas box inhabited by gerbils and blocks and monitored by a computer. Over this box a gantry moved and tried to keep the little world in order, following a specific set of rules:

Leave the blocks alone, unless a block has been knocked or pushed or fallen out of alignment with the grid, in which case:
1. If a displaced block isn’t aligned within a grid cell, straighten it to nearest cell, or…
2. If a displaced block is on the floor AND touches another block, place the displaced block on the top of that block or stack.
The objective of this experiment was to reflect on the limitations of the computational systems in dealing with changes in their context, and how rule based systems can be used to creatively explore the possibilities of animal/man-machine interaction. In SEEK, a computational vision system allowed context recognition and reaction to the changes therein.
KUKA IIWA is the latest generation of collaborative robotic arms. It is equipped with sensors that allow it identify collisions. Contrary to other robotic arms, IIWA can react to changes in its environment using its force sensors.
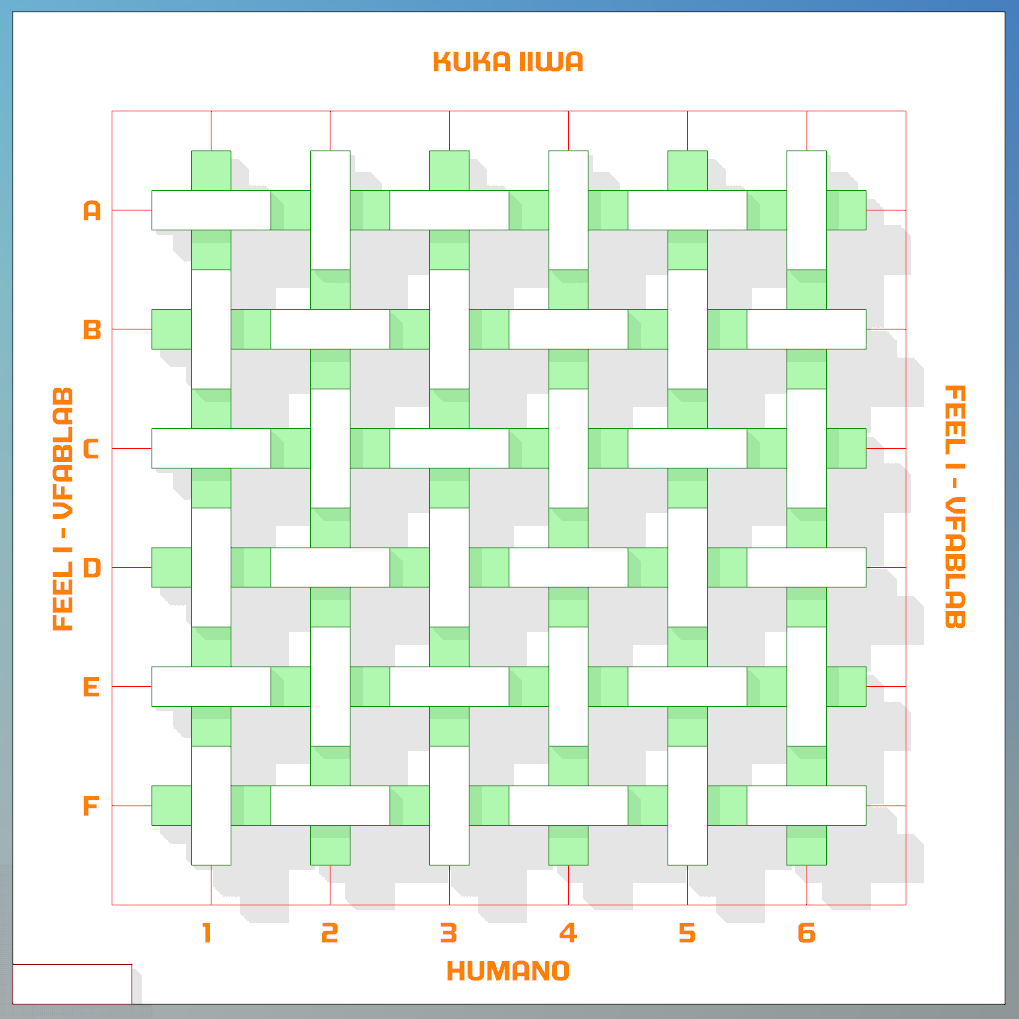
FEEL I gets its’ inspiration from SEEK, and explores the sensitivity of IIWA to trigger rules in reaction to changes in the context. The objective of the robot is to build a matrix of blocks, but if the robot detects that there have been changes to the expected position of the blocks, it places the block at a new position correcting the rotation:
1. If it finds a block above what is expected, it places the new block on the new position with the correct rotation to maintain the pattern ;
2. If while placing the block at its intended position IIWA doesn’t find support, it searches for support and places the block at the new position correcting the rotation.

Visitors of VFABLAB stand at FISTA 2019, taking place at ISCTE-IUL today and tomorrow, are invited to collaborate with the robot in building the structure by adding or removing blocks. The outcomes are a result of this interaction.