 English
English Português
PortuguêsEm 1970, Nicolas Negroponte e o Architecture Machine Group apresentaram pela primeira vez a peça SEEK na exposição “Software”, curada por Jack Burnham para o Museu Judeu em Nova Iorque. A peça consistia numa caixa de acrílico monitorizada por computador e habitada por ratos e pequenos blocos, sobre a qual se deslocava um braço robótico. O objectivo do sistema computacional era manter o mundo de blocos ordenado. Para isso seguia as seguintes regras:

Deixa os blocos como estão a não ser que um bloco tenha sido derrubado ou saia do alinhamento da grelha, nesse caso:
1. Se o bloco deslocado não está alinhado com a grelha de células, alinha-o com a célula mais próxima.
2. Se o bloco caiu na base e toca noutro bloco, coloca-o em cima desse bloco(s).
O objectivo desta experiência era refletir sobre as limitações dos sistemas computacionais e de que forma se poderiam explorar criativamente as possibilidades de interação entre animais/homem-máquina. Um sistema de visão computacional permitia reconhecer e reagir às mudanças no contexto.
KUKA IIWA é um braço robótico colaborativo de última geração. Possui sensores que lhe permitem identificar colisões. Ao contrário de outros braços robóticos, a IIWA pode reagir a alterações no seu contexto usando os seus sensores.
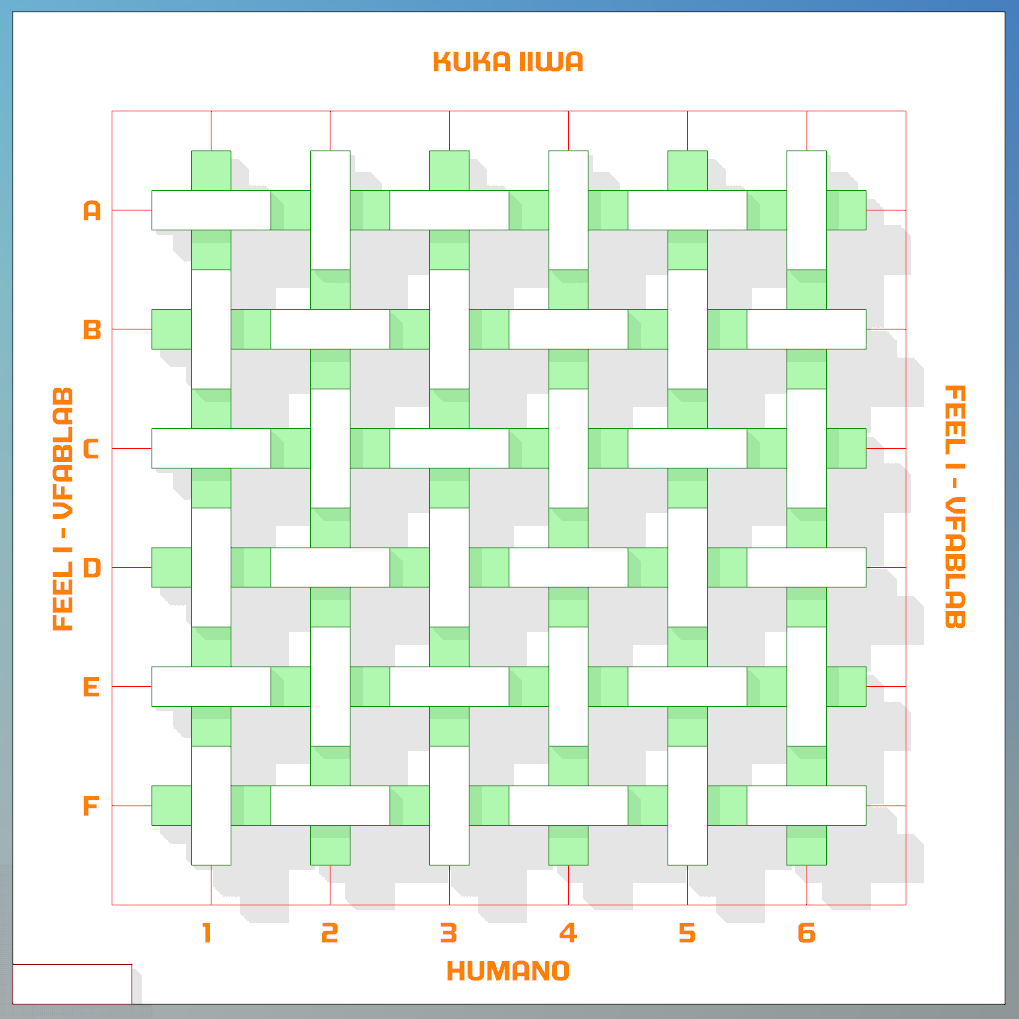
FEEL I inspira-se na experiência do SEEK, e explora a sensibilidade da IIWA como forma de reação ao contexto. O objetivo do robot é construir uma matriz de blocos mas se detetar que houve alterações na posição dos blocos ela coloca o bloco numa posição nova, corrigindo a rotação:
1. Se o encontrar um bloco antes do que era suposto, coloca o novo bloco na nova posição e corrige a sua rotação para manter o padrão:
2. Se ao colocar o novo bloco não encontrar o suporte desse bloco, procura o próximo bloco e coloca o novo bloco sobre esse bloco, corrigindo a rotação.

Os visitantes do stand do VFabLab no FISTA 2019, que decorre entre os dias 13 e 14 de Fevereiro no ISCTE-IUL, são convidados a colaborar com o robot na construção da estrutura, adicionando ou removendo blocos. Os resultados finais são produto desta interação.